Pulses from sensors[]
Sensors trigger controllers. This is often referred as Pulse. A controller execute ONLY when receiving at least one pulse from a connected sensor. A pulse exists or does not exist.
The state of a sensor can be True or False.
- A sensors state is True if the sensor evaluated True (e.g. a near sensor sensed an object)
- A sensors state is False if the sensor evaluated False (e.g. a near sensor did not sense an object)
Different parameters on the sensor's logic block control when a sensor fires a pulse. This is extremly important as it has direct influence on the game logic and the performance. It is up to the controllers how to react on TRUE and FALSE states of the connected sensors.
Other parameter change the status of the sensor after evaluation.
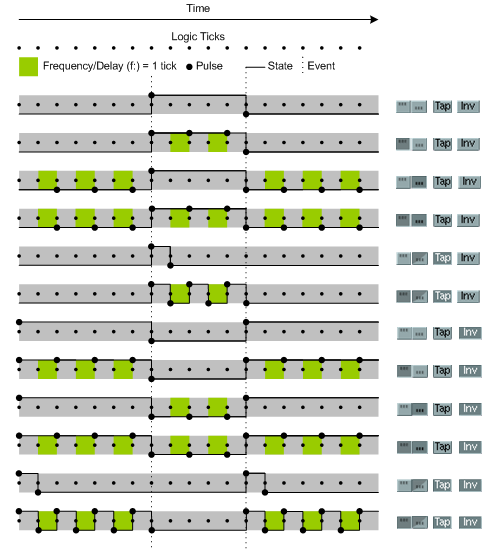
The following graph shows when a (near) sensor sends a Pulse and what State it has under certain settings.
No parameter set[]
With no parameters set the sensor fires pulses only when the sensor's state changes.
In between the controllers might still request the sensor's state. But if the controller does not get pulses (TRUE or FALSE) from any other sensor it will not be activated at all.
TRUE level triggering[]
If the TRUE level triggering parameter is set the controllers receive pulses as long as the sensor's state is True. The sensor will fire pulses with the frequency of the sensor.
FALSE level triggering[]
If the FALSE level triggering parameter is set the controllers receive pulses as long as the sensor's state is False. The sensor will fire pulses with the frequency of the sensor.
Frequency/Delay of repeated pulses[]
The f: paramter sets the frequency of the sensor. That means it defines the delay between repeated pulses. It is measured in logic ticks. 0 is default and means no delay. 1 means there is a delay of one frame until the sensor sends the next pulse if the sensor state did not change inbetween.
Inverted level[]
This parameter does not influence the pulse but the sensor's state.
When the Inv parameter is set the sensor's status will be interpreted inverse. If the evaluation was True the status gets False and vice versa.
Tap[]
This parameter does not influence the pulse but the sensor's state.
When the Tap parameter is set the sensor will change its state to False within the next frame, even when the sensor evaluates True. When the sensor evaluates False no pulse will be fired.
Is the TRUE level mode set, the sensor state will consecutive change from True to False until the sensor evaluates False.
The FALSE level mode will be ignored when the Tap parameter is set. This is because a False state remains False state.